源网荷储容量配置及优化调度的快速控制原型开发项目
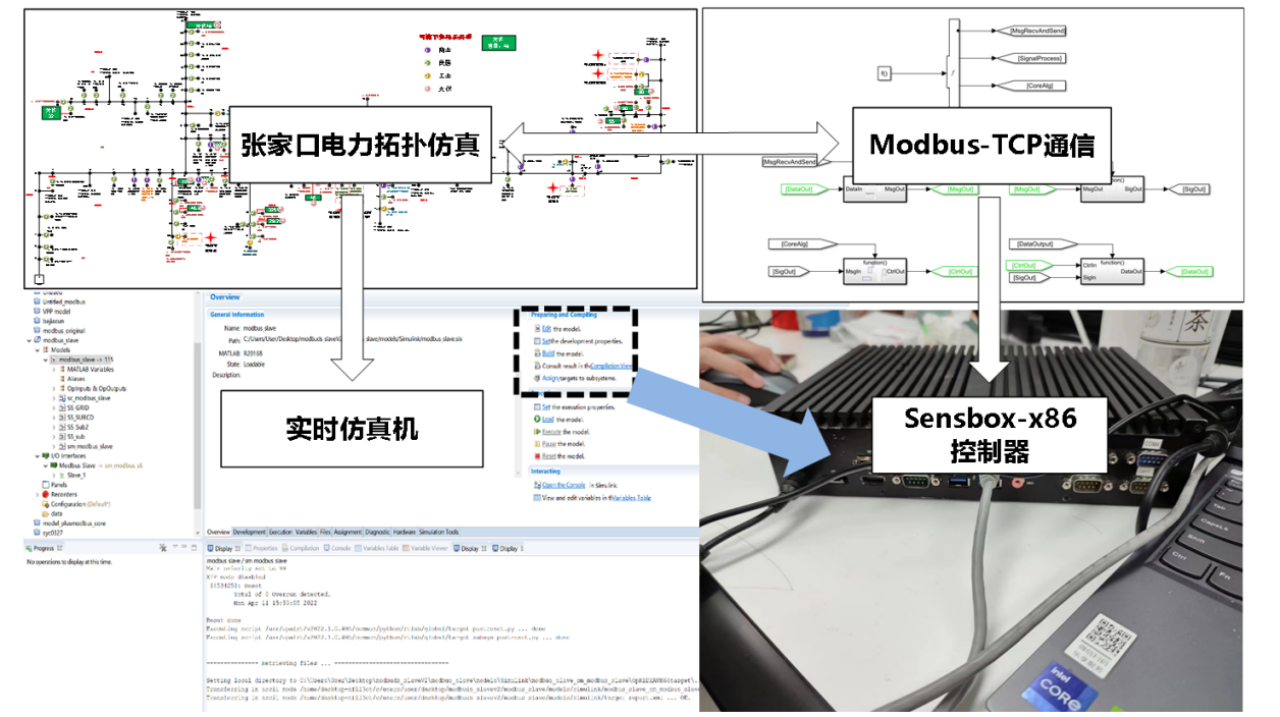
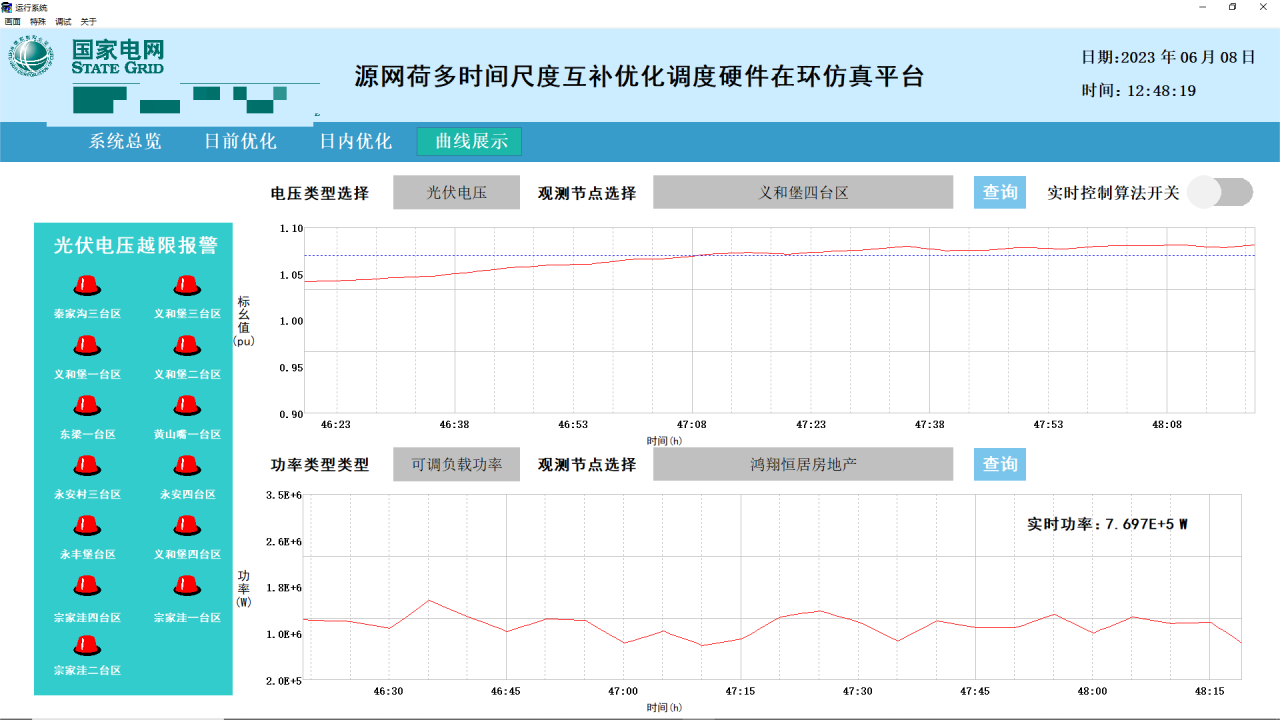
- 源网荷多时间尺度互补优化调度硬件在环仿真平台包括新能源汇集电网和若干新能源场站仿真模型、算法控制器、源网荷多时间尺度互补优化调度硬件在环仿真平台上位机。在RT-LAB实时仿真系统中进行新能源汇集电网和若干新能源场站仿真模型的搭建,调度算法模型运行于SensBox-x86快速控制原型平台,RT-LAB与SensBox-x86之前通过modbus-tcp进行通信,上位机使用组态王监控组态软件对SensBox-x86状态进行监控,最终实现对调度算法的测试与验证。
燃料电池硬件在环测试系统开发项目
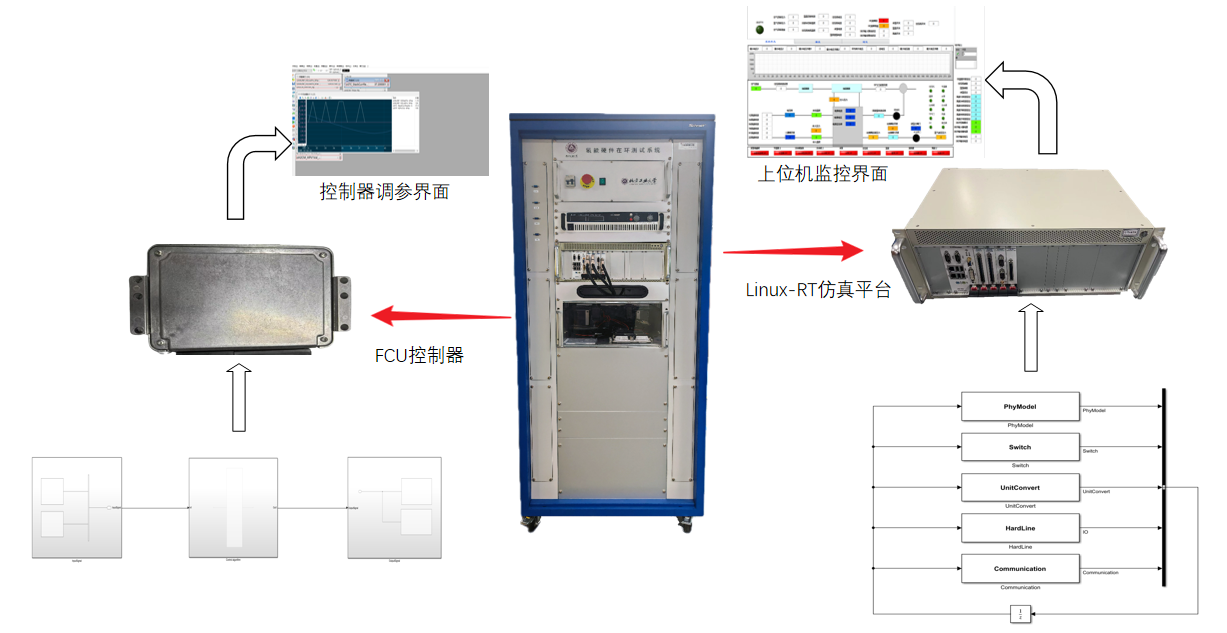
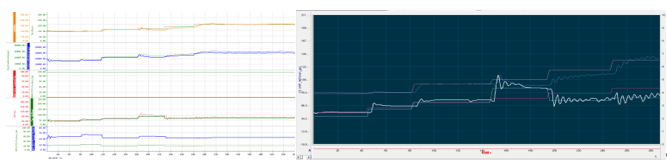
- 根据给定的燃料电池系统参数和系统架构建立燃料电池的数学和物理模型,并对模型进行参数化标定,主要涉及空气路、氢气路、电堆、热管理几部分的建模,最终燃料电池模型运行在SensBox实时仿真机上,对FCU控制器进行测试与验证。
六自由度机器人半实物仿真平台项目
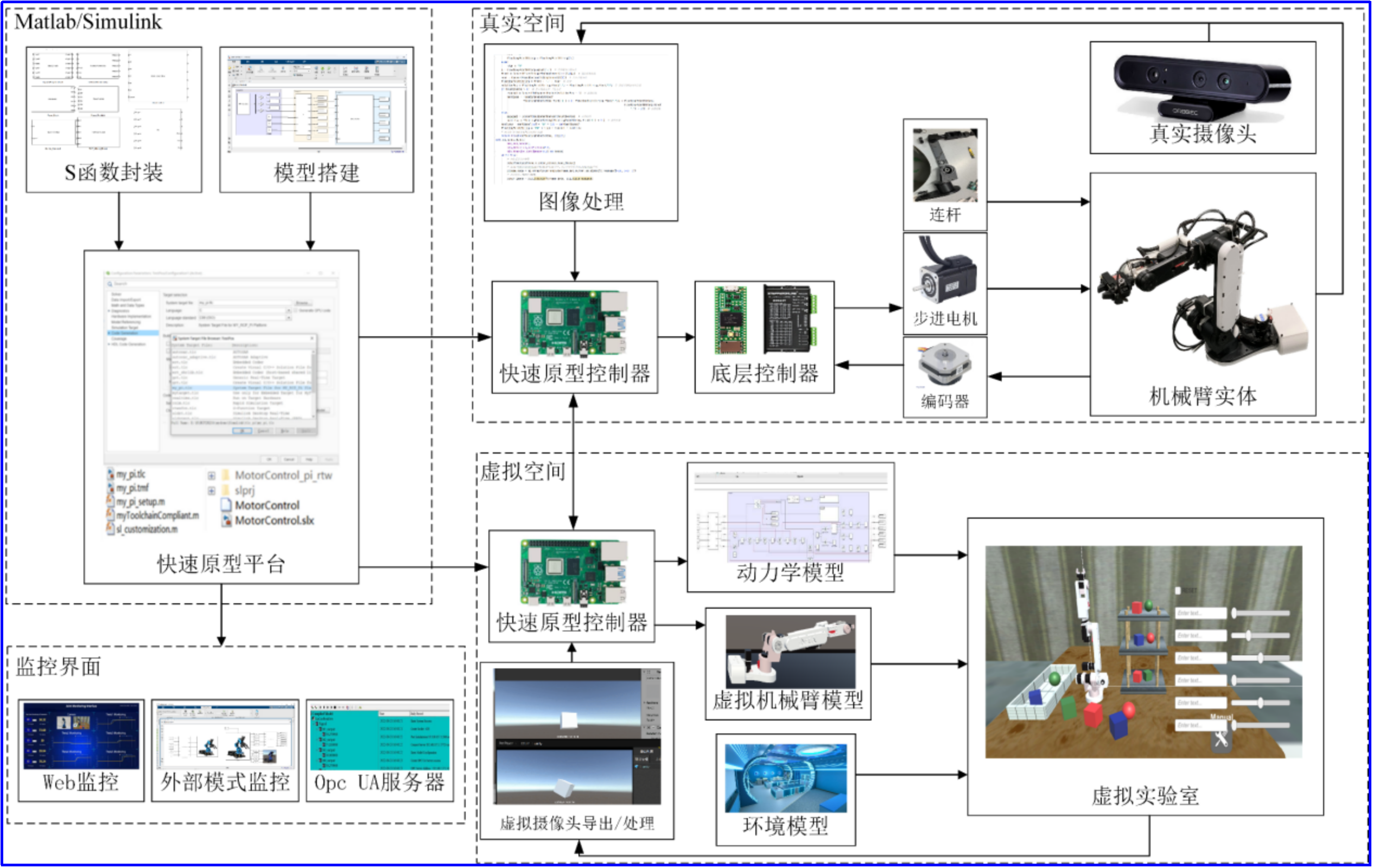
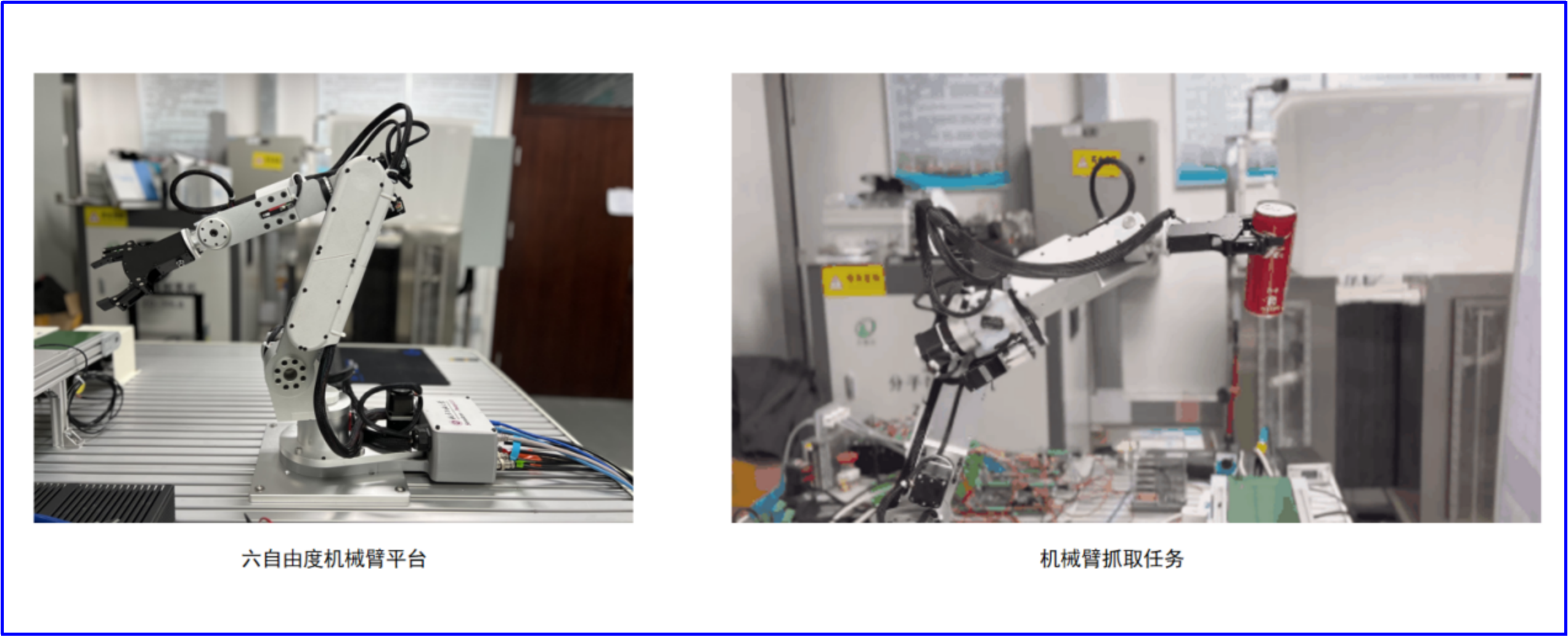
- 基于用户的六自由度机械臂,结合数字孪生技术,开发了机械臂快速控制原型系统(RMCS),为用户提供了一个机械臂控制算法验证平台。该平台提供多种实验手段,可以在仿真实验和物理实验之间进行任意切换和组合,实现机械臂虚实交互功能。在数据监控部分,通过数据显示界面与3D虚拟场景界面的结合,使用户体验更加友好。
基HDL Coder和Simulink Coder的双电机协同控制项目
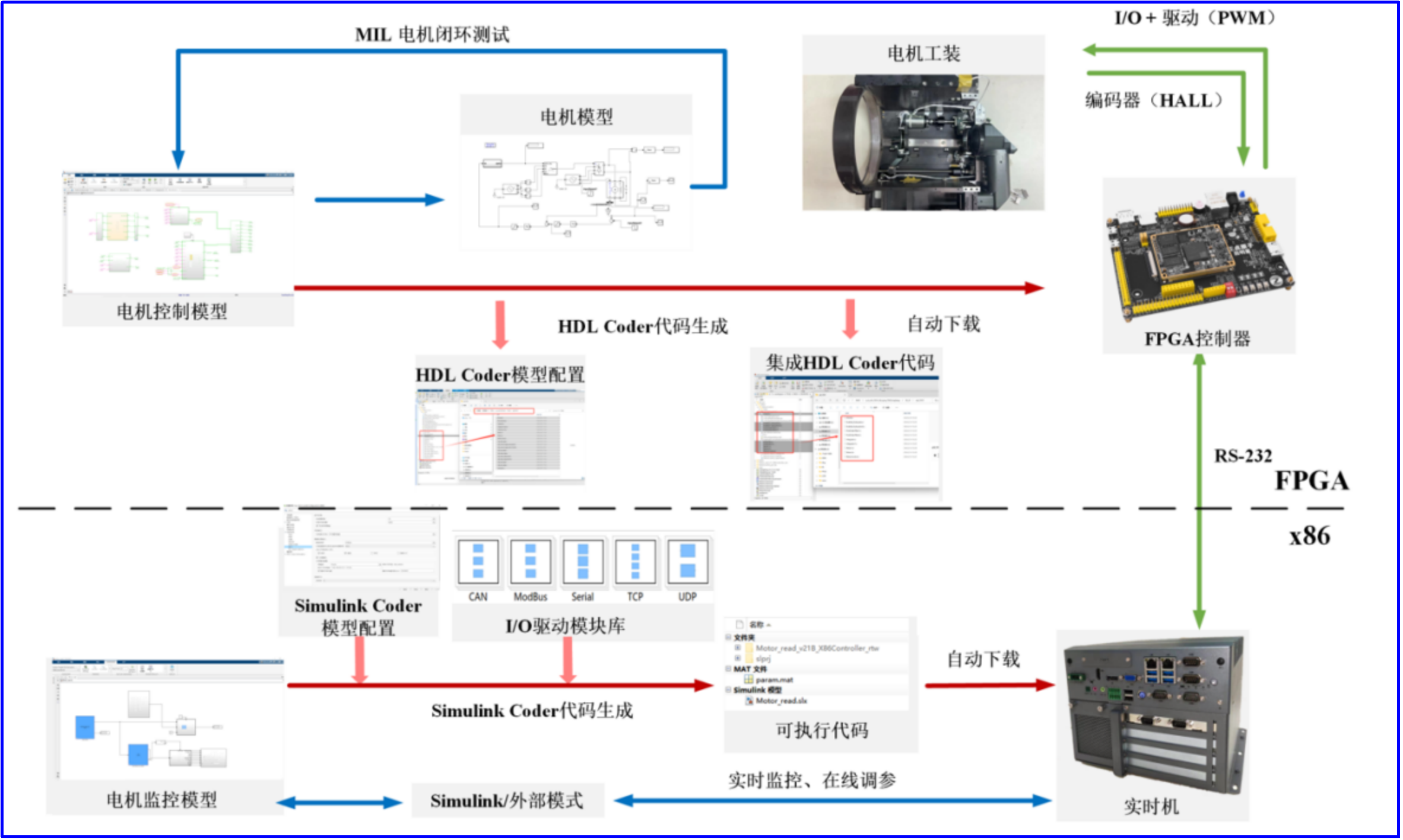
- 某视觉产品,需要针对两个镜头进行精确协同控制,两个镜头由两个电机进行牵引,分为主从两个电机,分别实现变倍和调焦功能,两个电机分别通过丝杆控制两个镜头,要求调焦镜头随变倍镜头进行精确位置控制,变倍丝杆长135mm,调焦丝杠长20mm,电机旋转一圈,丝杆带动镜头运动1mm。电机控制算法采用基于HDL Coder的代码自动生成,部署到FPGA控制器,采用SensBox快速控制原型搭建电机测试系统,快速便捷的完成电机控制算法的开发与标定。
底盘快速控制原型平台开发项目
- 基于x86架构和Linux-RT的快速控制原型开发,系统需要集成第三方CAN FD板卡,并且需要具有一定的算力,从而满足对底盘域控制算法验证的需
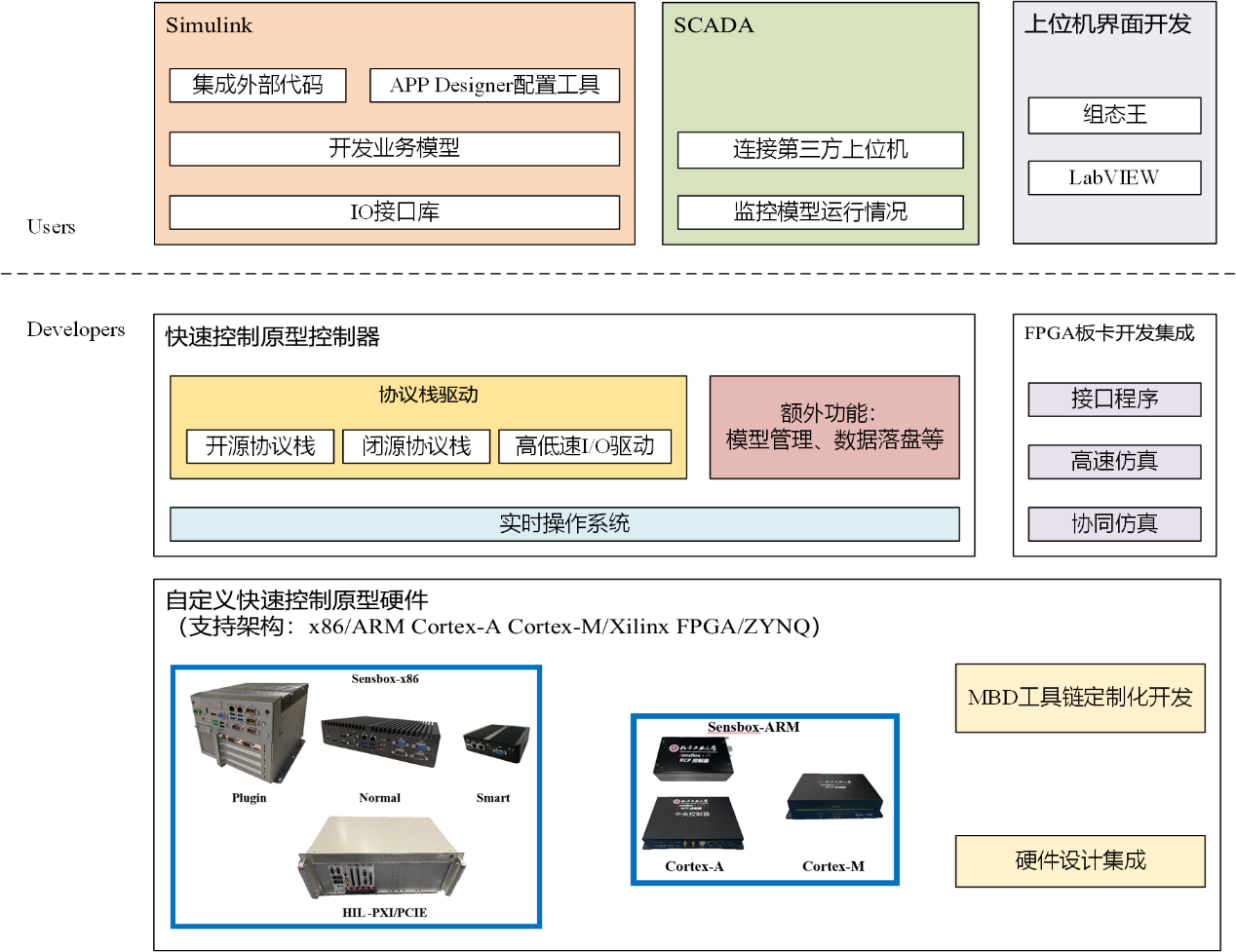
基于MBD的控制器定制化开发项目
- 基于x86/ARM/FPGA(Zynq)硬件架构,SensBox提供从离线仿真到在线仿真的一站式解决方案。平台支持在MATLAB/Simulink图形化建模环境中一键自动生成源代码,并将源代码自动编译成可执行文件,然后自动下载到控制器中运行。该平台支持客户指定的硬件开发MBD工具链,提供多种接口总线协议,如CAN、UDP、TCP、RS-232、RS-485等。此外,平台支持集成第三方板卡和自定义通信协议的开发。提供多种实时数据监控方式, Simulink外部模式监控简单模型;使用自主开发的上位机软件监控复杂模型,软件支持通过OPC UA协议将数据转发到第三方上位机软件,以实现个性化的UI界面。